Запоминающий реверсивный счётчик витков. Самодельный намоточный станок Электронный счетчик витков для намоточного станка
И не о чём не помышлял, пока не попалось мне на глаза какое-то незамысловатое счётное устройство. То, что оно должно быть приспособлено для подсчёта количества наматываемых витков провода на катушки трансформаторов - сомнению не подлежало, ибо нет наслаждения выше, чем делая одно, думать о другом. А разве находясь в состоянии полного сосредоточения (сродни трансу
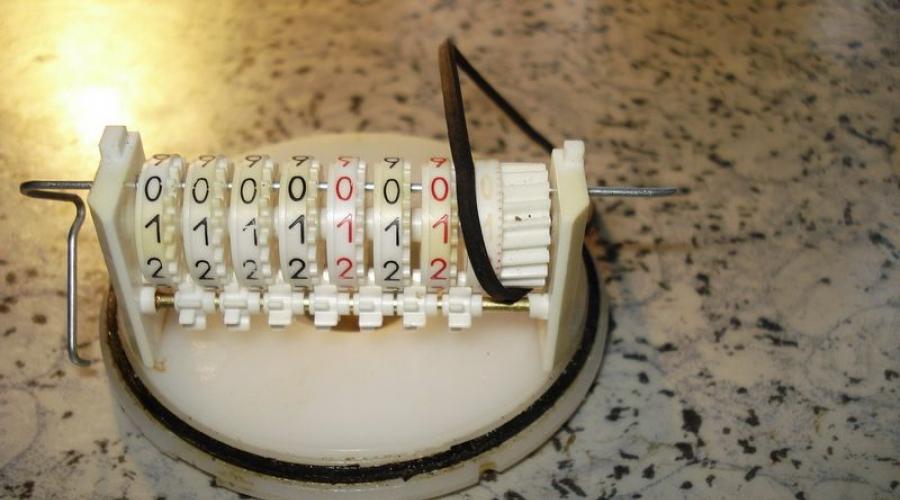
) и при этом бубня отсчёт витков, это возможно? А приспособить не сложно. Также как и найти такую же штукенцию или ей подобную. Различных счётчиков сейчас уйма, а подойдёт даже неисправный. Тем более, что в начале его нужно аккуратно, запоминая взаимное расположение деталей (а лучше всё это сфотографировать) «распотрошить» и выкинуть всё лишнее.
Итак, из внутреннего содержимого оставляем цифровые колёса, зубчатые шестерни, оси для их посадки и стойки-держатели осей которые собираем «по месту» (так, как они и стояли до разборки). Оси в левую стойку желательно вклеить. На цифровых колёсах, рядом с центральным отверстием есть ещё одно – сборочное, им колесо надевается на шпильку (ровную и упругую проволочку, которая убирается перед установкой колпака). Без этой помощницы ничего не выйдет. При этом перед креплением второй стойки не забываем надеть на ведущее колесо резиновый пассик (лучше плоский) подходящей длины.

В донной части и в колпаке, по центру, делаем сквозные отверстия (например диаметром 3мм) для дальнейшего их скрепления винтом с гайкой. Это обязательно, ибо в процессе эксплуатации будут присутствовать сотрясения конструкции, при которых всё нами собранное будет постоянно разваливаться (проверено). Также в колпаке делается пропил шириной чуть менее (чтоб не слетал пассик) ведущего цифрового колеса и длиной через весь колпак. Не лишними будут ещё одно – два отверстия в боковой стенке колпака, они пригодятся при его установке на место, ибо при этом нужно попасть верхними шлицами на стойках в соответствующие пазы (кстати, левый и правый разные размером – не путать) внутри колпака. Вот через них отвёрточкой и направлять. В донной части нужно предусмотреть пару отверстий для крепления винтами или шурупами всей, уже собранной конструкции к намоточному устройству.

Как и в каком месте крепить, собранный счётчик к намоточному устройству – полная свобода творчества. А вот их рабочее соединение - вот такое:

На ведущий вал намоточного устройства устанавливается шкив (это в идеале) или втулка из мягкой пластмассы с внутренним диаметром чуть менее 6 мм (чтобы одевались внатяг) и наружным диаметром при котором один поворот ведущего вала будет соответствовать одному повороту ведущего цифрового колеса счётчика. Самый простой вариант – на подходящую полихлорвиниловую или толстую пластмассовую трубку длиной 10 мм наматывается достаточной толщиной (ну скажем до диаметра 20 мм) узкий скотч (можно изоленту, но хуже) и начинаем настройку, при необходимости отматывая или подматывая скотч до оптимальной толщины.

Короче, добиваемся соотношения передаточного числа ОДИН к ОДНОМУ . Особо не упорствуя, получилось сделать погрешность в +1 виток на 150 оборотов вала намоточного устройства. Ну а известная погрешность полностью исключает неудовлетворительный итог работы. Теперь во время работы можно мечтать, петь песни и, при необходимости, достойно отражать нападки прочих членов семьи. С пожеланием успеха, Babay .
Обсудить статью СЧЁТЧИК ВИТКОВ
Случилось так, что припекло мне трансформатор мотать, всё бы хорошо, да станка только не хватает - от тут и началось! Поиск по интернетам дал некоторые возможные варианты построения, но смущало меня то, что подсчёт витков производится опять же механическим счётчиком, добытым из спидометра или старого магнитофона, либо геркон + калькулятор. Хм…
На механику, в плане счётчика, у меня не стояло абсолютно, спидометров на разборку у меня нет, лишних калькуляторов тоже. Да и как сказал тов. Serega
с другого ресурса: «Хорошие электронщики, зачастую - плохие механики!». Может я и не лучший электронщик – но механик уж точно паршивый.
Посему решил я сварганить электронный счётчик, а всю механическую часть устройства поручить на разработку семейству (благо отец и брат у меня как раз таки асы по части механики).
Прикинув одно место к другому, решил, что 4 разрядов индикаторов мне хватит с головой – это ж не много – не мало, а 10 000 витков. Управлять всем безобразием будет контроллер, вот только любимые ATtiny2313 и ATmega8 мне показалось совершенно не комильфо пихать в такое плевое устройство, задача простая и решать её нужно просто. Поэтому будем пользовать ATtiny13 – наверное, самый «дохлый» МК из тех, что есть в продаже на сегодняшний момент (я не беру PIC-и или MCS-51 – эти я только запрограммировать смогу, а вот программы для них писать не умею). Ног у этой тиньки маловато, ну дык никто не мешает нам сдвиговые регистры к ней прикрутить! В качестве датчика оборотов решил использовать датчик холла.
Набросал схему:
и собрал на макетке:

О кнопках сразу не сказал – а куда ж без них! Целых 4 штуки помимо ресета (S1).
S2 – включает режим намотки (режим установлен по умолчанию) – с каждым оборотом оси с катушкой будет увеличивать значение количества витков на 1
S3 – режим смотки, соответственно, с каждым оборотом, будет уменьшать значение на 1. Максимально смотать можно до «0» - в минус сматываться не будет:)
S4 – чтение сохраненной в EEPROM информации.
S5 – запись в EEPROM текущего значения + режим.
Естественно нужно не забывать нажать на кнопку смотки если собираемся сматывать витки, иначе они будут приплюсовываться. Можно было повесить вместо 1 датчика холла – 3 штуки или валкодер и изменить программу контроллера таким образом чтоб он сам выбирал направление вращения, но думаю в данном случае это лишнее.
Теперь не много по схеме:
Как видим, ничего сверхъестественного в ней нет. Питается всё это безобразие от 5В., ток потребляет что-то в районе 85мА.
Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только
Кнопки S2-S4 – а-ля матричная клавиатура. «Выходы» кнопок висят на тех же проводниках что и входы регистров, дело в том что после пересылки данных из контроллера в регистры на входах SHcp и Ds может быть сигнал любого уровня, и на содержимое регистров это никак не повлияет. «Входы» кнопок висят на выходах регистров, передача информации происходит примерно следующим образом: сначала контроллер отправляет информацию на регистры для последующей пересылки на индикаторы, затем отправляет информацию для сканирования кнопок. Резисторы R14-R15 необходимы для предотвращения «драки» между ногами регистров/контроллера. Пересылка инфы на индикацию и на сканирование клавы происходит на большой частоте (внутренний генератор в тини13 настроен на 9,6МГц), соответственно как быстро мы не пытались бы нажать и отпустить кнопку, за время нажатия произойдет много срабатываний и соответственно нолик с кнопки побежит на встречу единичке с контроллера. Ну и такая неприятная вещь как дребезг контактов кнопок опять же.
Резисторами R16-R17 подтягиваем нашу клавиатуру к + питания, чтоб во время простоя с выходов клавиатуры на входы контроллера приходила единичка а не Z состояние влекущее ложные срабатывания. Можно было обойтись и без этих резисторов, внутренних pull-up резисторов в МК вполне достаточно, ну да рука у меня не поднялась их убрать – береженного бог бережет.
По схеме вроде бы и все, для заинтересовавшихся привожу список компонентов. Сразу оговорюсь, что номиналы могут отличаться в ту или иную сторону.
Исключён фрагмент. Наш журнал существует на пожертвования читателей. Полный вариант этой статьи доступен только
После проверки работы счётчика на макете, настала пора собрать железку в «законченное устройство». Развел плату, вытравил, запаял детальки и получил следующее:


В законченом варианте кнопка сброса отсутствует - ну некуда мне ее было на плате втыкать, итак места мало, а если зависнет МК, значит обесточу и заново включу. Так же появился диод в цепи питания - защита от переполюсовки. Что касается остальных деталек – то использовал только те, что были под рукой, поэтому тут и SMD и обычные корпуса.
Вот вроде и все, в конце статьи архив со схемой/печаткой прошивкой.
Кстати насчёт прошивки, на плате не предусмотрен разъём для программирования в целях экономии места. Прошивал по SPI протоколу примерно так:

пробовал программаторы, HVProg, AVR910 и USBAsp – все прошили контроллер без проблем. После прошивки имеет смысл нажать кнопку записи, чтоб записать в EEPROM начальные значения. Если этого не сделать, а нажать клавишу чтения то на индикаторах можем увидеть все что угодно - кто знает что там в памяти было раньше?
Конечный результат:
На неподвижной части станка крепим датчик, на ось вращения устаналиваем магнит таким образом, чтоб он при вращении проходил в 3-5 мм от датчика. Ну и пользуемся:)
Теперь точно всё, всем спасибо за внимание, а товарищам GP1
и avreal
за помощь в разработке, ждем критику:)
Файлы
Схема, печатка, прошивка:▼ 🕗 10/02/10 ⚖️ 128,55 Kb ⇣ 354 Здравствуй, читатель! Меня зовут Игорь, мне 45, я сибиряк и заядлый электронщик-любитель. Я придумал, создал и содержу этот замечательный сайт с 2006 года.
Уже более 10 лет наш журнал существует только на мои средства.
Хорош! Халява кончилась. Хочешь файлы и полезные статьи - помоги мне!
--
Спасибо за внимание!
Игорь Котов,
главный редактор журнала «Датагор»
Исходники прошивки:
▼
🕗 04/03/10 ⚖️ 3,62 Kb ⇣ 254
Во многих устройствах бытовой техники и промышленной автоматики сравнительно недавних лет выпусков установлены механические счетчики. Они продукцию на конвейере, витки провода в намоточных станках и т. п. В случае выхода из строя найти аналогичный счетчик оказывается непросто, в отремонтировать невозможно ввиду отсутствия запасных частей. Автор предлагает заменить механический счетчик электронным.
Электронный счетчик, разрабатываемый на замену механическому, получается слишком сложным, если строить его на микросхемах малой и средней степени интеграции (например, серий К176, К561). особенно если необходим реверсивный счет. А чтобы сохранить результат при выключенном питании, необходимо предусмотреть резервную батарею питания.
Но можно построить счетчик всего на одной микросхеме - универсальном программируемом микроконтроллере, имеющем в своем составе разнообразные периферийные устройства и способном решать очень широкий круг задач. Многие микроконтроллеры имеют особую область памяти - EEPROM . Записанные в нее (в том числе во время исполнения программы) данные, например, текущий результат счета, сохраняются и после отключения питания.
В предлагаемом счетчике применен микроконтроллер Attiny2313 из семейства AVR фирмы Almel. В приборе реализован реверсивный счет, вывод результата с гашением незначащих нулей на четырехразрядный светодиодный индикатор, хранение результата в EEPROM при выключенном питании. Встроенный в микроконтроллер аналоговый компаратор использован для своевременного обнаружения уменьшения напряжения питания. Счетчик запоминает результат счета при отключении питания, восстанавливая его при включении, и аналогично механическому счетчику снабжен кнопкой обнуления показаний.
Схема счетчика представлена на рисунке. Шесть линий порта В (РВ2- РВ7) и пять линий порта D (PDO, PD1, PD4-PD6) использованы для организации динамической индикации результата счета на светодиодный индикатор HL1. Коллекторными нагрузками фототранзисторов VT1 и VT2 служат встроенные в микроконтроллер и включенные программно резисторы, соединяющие соответствующие выводы микроконтроллера с цепью его питания.
Увеличение результата счета N на единицу происходит в момент прерывания оптической связи между излучающим диодом VD1 и фототранзистором VT1, что создает нарастающий перепад уровня на входе INT0 микроконтроллера. При этом уровень на входе INT1 должен быть низким, т. е. фототранзистор VT2 должен быть освещен излучающим диодом VD2. В момент нарастающего перепада на входе INT1 при низком уровне на входе INT0 результат уменьшится на единицу. Другие комбинации уровней и их перепадов на входах INT0 и INT1 результат счета не изменяют.
По достижении максимального значения 9999 счет продолжается с нуля. Вычитание единицы из нулевого значения дает результат 9999. Если обратный счет не нужен, можно исключить из счетчика излучающий диод VD2 и фототранзистор VT2 и соединить вход INT1 микроконтроллера с общим проводом. Счет будет идти только на увеличение.
Как уже сказано, детектором снижения напряжения питания служит встроенный в микроконтроллер аналоговый компаратор. Он сравнивает нестабилизированное напряжение на выходе выпрямителя (диодного моста VD3) со стабилизированным на выходе интегрального стабилизатора DA1. Программа циклически проверяет состояние компаратора. После отключения счетчика от сети напряжение на конденсаторе фильтра выпрямителя С1 спадает, а стабилизированное еще некоторое время остается неизменным. Резисторы R2-R4 подобраны так. что состояние компаратора в этой ситуации изменяется на противоположное. Обнаружив это, программа успевает записать текущий результат счета в EEPROM микроконтроллера еще до прекращения его функционирования по причине выключения питания. При последующем включении программа прочитает число, записанное в ЕЕРРОМ, и выведет его на индикатор. Счет будет продолжен с этого значения.
Ввиду ограниченного числа выводов микроконтроллера для подключения кнопки SB1, обнуляющей счетчик, использован вывод 13, служащий инвертирующим аналоговым входом компаратора (AIM) и одновременно - "цифровым" входом РВ1. Делителем напряжения {резисторы R4, R5) здесь задан уровень, воспринимаемый микроконтроллером как высокий логический При нажатии на кнопку SB1 он станет низким. На состояние компаратора это не повлияет, так как напряжение на входе AIN0 по-прежнему больше, чем на AIN1.
При нажатой кнопке SB1 программа выводит во всех разрядах индикатора знак "минус", а после ее отпускания начинает счет с нуля. Если при нажатой кнопке выключить питание счетчика, текущий результат не будет записан в EEPROM, а хранящееся там значение останется прежним.
Программа построена таким образом, что ее легко адаптировать к счетчику с другими индикаторами (например, с общими катодами), с другой разводкой печатной платы и т. п. Небольшая коррекция программы потребуется и при использовании кварцевого резонатора на частоту, отличающуюся более чем на 1 МГц от указанной.
При напряжении источника 15 В измеряют напряжение на контактах 12 и 13 панели микроконтроллера относительно общего провода (конт.10). Первое должно находиться в интервале 4...4.5 В, а второе - быть больше 3,5 В, но меньше первого. Далее постепенно уменьшают напряжение источника. Когда оно упадет до 9... 10 В, разность значений напряжения на контактах 12 и 13 должна стать нулевой, а затем поменять знак.
Теперь можно установить в панель запрограммированный микроконтроллер, подключить трансформатор и подать на него сетевое напряжение. Спустя 1,5...2 с нужно нажать на кнопку SB1. На индикатор счетчика будет выведена цифра 0. Если на индикатор ничего не выведено, еще раз проверьте значения напряжения на входах AIN0.AIN1 микроконтроллера. Первое должно быть больше второго.


Давно хотел собрать счетчик витков для ручного намоточного станка. Хотелось сделать устройство с батарейным питанием от двух микропальчиковых батарей, потребляющее мало энергии в рабочем режиме, имеющее простое кнопочное управление-«Сброс», «Вкл/Выкл». Счетчик должен уметь реверсно считать. Иногда приходится отматывать витки, или бывают не штатные ситуации.
В наличии были STM8S003F3P6 и STM8L051F3P6 в корпусах TSSOP-20. Выяснилось что S003 не годится для моей задумки-у нее питания 3-5в, и скорее всего при 50% разряде 3вольтовой батареи микроконтроллер работать не будет. Поэтому выбор пал на STM8L051F3P6. По даташиту питание у нее от 1,8 до 3,6в. В качестве дисплея решено было использовать МT-10T7 Российского производителя МЭЛТ. Данный ЖК был куплен лет 7 назад, с тех пор достойного применения так и не нашел.Выкинуть его было жалко.
Поговорим о датчике.Сначала я использовал интегральные датчики Холла,формирующие логический сигнал на выходе. Достались с платы подводного фонаря. Оказалось, что они перестают срабатывать уже при небольшом числе оборотов. Это меня огорчило. Пришлось изобретать свой велосипед. Решил использовать датчики холла от мотора cd-rom привода и ОУ lm358. Крайне сомнительно была работа этой затеи от 3в. Но попытка не пытка. На мое удивление схема отлично заработала при таком питании.

Схема проще не придумаешь. R5-задает ток через датчики Холла U1,U2. На DA1, сделан усилитель с КУ=50. Сигналы с выходов DA1 не соответствуют логическим уровням STM8,поэтому к его выходам подключены транзисторы Q1,Q2 представляющие преобразователя уровней.Входы микроконтроллеров подтянуты через резисторы к плюсу,поэтому дополнительный огород городить не стал. Зачем на плате предусмотрены элементы С1,С2-уже и не помню.Очевидно собирался бороться с помехами. Транзисторы на самом деле bc817-40. Но и те что на схеме должны работать. Датчики холла hw-101A(маркировка D).
Питание на датчик, и дисплей приходят с вывода PB1 микроконтроллера. Нагрузочной способности для этих целей более чем достаточно.

R1 это перемычка. Номинала 0 Ом у меня не нашлось,поэтому поставил самый мелкий что был.
Максимальное значение для счета это 65535. Кнопка «RESET» используется для сброса показаний счетчика, «ON/OFF» -вкл/выкл устройства.
Печатную плату можно назвать скорее отладочной.


Фото готового устройства.

В качестве датчика оборотов выступает стеклотекстолитовый диск, с приклеенным на нем ниодиевым магнитом диаметром 5мм,толщиной 1мм, и плата с датчиками Холла.Растояние между магнитом и датчиками около 5мм. Половина знакомест на дисплее осталась не задействована. Ни чего умнее не придумал-как показывать там напряжение питания. Контрастности индикатора не достаточно,поэтому пришлось наклонить всю плату под 45градусов. На фото датчик прикреплен скотчем, потом я его прикрепил несколькими витками изоленты. Конструкция получилась не шибко эстетичной, но этого мне вполне достаточно. Сам намоточный станок-ничто иное как старый механизм для перемотки кинопленки.Ни знаю какие манипуляции он был призван производить, но на него надевается бобина с пленкой. Индикатор,батарейный отсек, плата микроконтроллера приклеены к куску текстолита термоклеем.
Потребляемый ток во включенном состоянии 12,8мA , в выключенном 1,71мкА.
Программное обеспечение.
Код написан в среде IAR Embedded Workbench IDE. Микроконтроллер работает от встроенного RC генератора HSI с частотой 16мгц. Подсчетом числа витков занимается таймер общего назначения TIM2. Он имеет 16битный счетный регистр, и возможность работы с экодером(encoder mode). Это существенно облегчает задачу. Достаточно настроить таймер, и забыть. Он сам по себе будет считать значения, и реализовывает возможности реверсного счета. Правда из-за особенностей работы этого режим значения в регистре счетчика- в два раза больше реальных.
Конечно же значения из TIM2 нужно как то извлекать, и выводить на экран. Этим занимается 8битный TIM4, генерирующий прерывания, по которому происходит эта операция. Прерывания приходят каждые 8мс. В обработчик добавлен опрос кнопки «сброс»,и манипуляции по выводу информации от АЦП и TIM2 на экран.
Измерением напряжения батареи занимается АЦП. Вход опорного напряжения, внутри соединен с плюсовым источником питания микроконтроллера. Выбрать внутренний источник нельзя(как это например сделано в AVR). Зато можно измерить напряжение этого самого источника. Напряжение источника VREF измерено на заводе и записано в VREFINT_Factory_CONV byte,его можно считать.
Что бы основной программе не было скучно, она смотрит-не завершено ли преобразование АЦП и на основе 16 выборок вычисляет среднее.
Включение/выключение схемы реализовано на основе внешнего прерывания по нажатию на кнопку. По приходу прерывания меняем переменную, и сидим ждем пока кнопку отпустят.
Если пользователь хочет выключить устройство,то основная программа сохраняет значение счетного регистра TIM2 в ОЗУ. Все не задействованные выводы делает выходами,устанавливает на них нуль. Если этого не сделать у меня ловит помехи. Отключаем источник эталонного напряжения VREF и АЦП и засыпаем. Использован самый экономичный режим halt. Проснется микроконтроллер от нажатия кнопки «On»,по внешнему прерыванию(External interrupts).
Прошивка микроконтроллера.
Это отдельная история. Когда покупал STM32F0 Discovery, думал что программатор на ней умеет шить STM8.Оказалось что нет. Тратить деньги на отдельный программатор не хотелось, а возможности прошивки по USART меня не впечатлила(да и не всё 8битное семейство умеет это).
В радиолюбительской практике, часто возникает необходимость намотать/перемотать различные обмотки трансформаторов, дросселей, реле и др. .
При разработке данного станка, ставились следующие задачи:
1. Малые габариты.
2. Плавный старт шпинделя.
3. Счётчик до 10000 витков (9999).
4. Намотка с автоматической укладкой провода. Шаг укладки (диаметр провода) 0.02 - 0.4мм.
5. Возможность намотки секционных обмоток без перенастройки.
6. Возможность закрепления и намотки каркасов без центрального отверстия.

Рисунок 1.
Внешний вид намоточного станка.
Состав намоточного станка.
1. Подающая бобина (катушка с проводом).
2. Притормаживание (тормозной механизм).
3. Шаговый двигатель центровки бобины.
4. Шариковые мебельные направляющие.
5. Шторка оптических датчиков механизма центровки бобины.
6. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
7. Кнопки ручного переключения направления укладки.
8. Светодиоды направления укладки.
9. Шаговый двигатель позиционера.
10. Шторки оптических датчиков границы намотки.
11. Винт позиционера.
12. Шариковые мебельные направляющие.
13. Наматываемая катушка.
14. Двигатель намотки.
15. Счётчик витков.
16. Кнопки настройки.
17. Оптический датчик синхронизации.
18. Регулятор скорости.
Устройство и принцип действия.
Подающий узел.
Подающий узел предназначен для закрепления на нём бобины с проводом, различных величин, и обеспечения натяжения провода.
В него входит механизм крепления бобин и механизм подтормаживания вала.

Рисунок 2.
Подающий узел.
Подтормаживание.
Без подтормаживания подающей бобины, намотка провода на каркасах будет рыхлая и качественной намотки не получится. Войлочная лента «2», тормозит барабан «1». Поворот рычага «3», натягивает пружину «4» - регулировка силы торможения. Для разной толщины провода, настраивается своё притормаживание. Здесь используются готовые детали видеомагнитофона.

Рисунок 3.
Подтормаживающий механизм.
Центровка бобины.
Малые габариты станка и расположение в непосредственной близости, наматываемой катушки и подающей бобины с проводом, потребовали ввести дополнительный механизм центровки подающей бобины.


Рисунок 4, 5.
Центрирующий механизм.
При намотке катушки, провод с бобины воздействует на шторку «5», выполненной виде “вилки” и шаговый двигатель «3», через редуктор с делением 6 и зубчатый ремень, по роликовым направляющим «4», автоматически сдвигает бобину в нужном направлении.
Таким образом, провод всегда находится по центру см. рис 4, рис 5:

Рисунок 6.
Датчики, вид сзади.
Состав и устройство датчиков.
19. Оптические датчики механизма центровки бобины.
5. Шторка перекрывающая датчики механизма центровки бобины.
20. Шторки перекрывающие датчики переключения направления позиционера.
21. Оптические датчики переключения направления позиционера.
Позиционер.
Шторками «20» рис. 6 - выставляется граница намотки. Шаговый двигатель, перемещает механизм укладчика, пока шторка не перекроет один из датчиков «21» рис. 6, после чего меняется направление укладки.
В любой момент можно изменить направление укладки кнопками «1» рис. 7.

Рисунок 7.
Укладчик.
Скорость вращения шагового двигателя «9» рис. 7, синхронизирована с помощью датчика «10», «11» рис 8, с вращением наматываемой катушки и зависит от диаметра провода установленного в меню. Диаметр провода, может быть выставлен 0.02 - 0.4мм. С помощью ручки «8» рис. 7, можно передвинуть весь позиционер в сторону, не изменяя границы намотки. Таким образом, можно намотать другую секцию в многосекционных каркасах.

Рисунок 8.
Оптодатчик.
Состав позиционера и оптодатчика (рис. 7-8).
1. Кнопки ручного переключения направления укладки.
2. Светодиоды направления укладки.
3. Шторки перекрывающие датчики переключения направления позиционера.
4. Линейный подшипник.
5. Капролоновая гайка.
6. Ведущий винт. Диаметр 8мм, шаг резьбы 1,25мм.
7. Шариковые мебельные направляющие.
8. Ручка перемещения позиционера на другую секцию при намотке секционных обмоток.
9. Шаговый двигатель.
10. Оптический датчик синхронизации.
11. Диск, перекрывающий датчик синхронизации. 18 прорезей.
Приёмный узел.

Рисунок 9.
Приёмный узел.


Рисунок 10, 11.
Приёмный узел.
1. Счётчик витков.
2. Коллекторный высокоскоростной двигатель.
3. Шестерня редуктора.
4. Кнопка «сброс счётчика».
5. Регулировка скорости.
6. Включатель «Старт намотки».
7. Крепёж наматываемой катушки.
Вращение наматываемой катушки, производит коллекторный высокооборотный двигатель через редуктор.
Редуктор состоит из трёх шестерён с общим делением 18. Это обеспечивает необходимый вращающий момент на малых оборотах.
Регулировка скорости двигателя, производится изменением питающего напряжения.

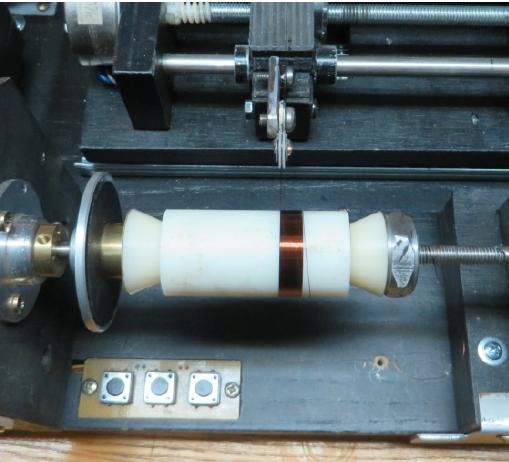
Рисунок 12, 13.
Крепление каркаса имеющего отверстие.
Конструкция приёмного узла позволяет закреплять, как каркасы имеющие центральное отверстие, так и каркасы, таких отверстий не имеющие, что хорошо видно на рисунках.


Рисунок 14, 15.
Крепление каркаса не имеющего отверстие.
Электрическая схема.

Рисунок 16.
Электрическая схема намоточного станка.
Всеми процессами станка, управляет микроконтроллер PIC16F877.
Индикация количества витков и диаметра провода, отображается на светодиодном четырёх знаковом индикаторе. При нажатой кнопке «D», отображается диаметр провода, при отжатой количество витков.
Для изменения диаметра провода, нажать кнопку «D» и кнопками «+», «-» изменить значение. Установленное значение автоматически сохраняется в EEPROM. Кнопка «Zerro» - обнуление счётчика. Разъём «ISCP» служит для программирования микроконтроллера.
P.S. Чертежей механической части не существует, потому что устройство изготовлялось в одном экземпляре, и конструкция формировалась в процессе сборки.
В данной конструкции были использованы имеющиеся в разборке элементы и узлы (не имеющие маркировки) от видеомагнитофонов и принтеров.
Ни в коем случае я не настаиваю в точном повторении данной конструкции, а лишь как в использовании каких-либо узлов от неё в своих конструкциях.
Повторение данного устройства возможно опытными радиолюбителями, имеющие навыки работы с механикой и способными изменить конструкцию под свои, имеющиеся механические части.
Механическая часть соответственно, может быть реализована по другому.
Редукторы на двигателях, могут быть и с другим делением.
Критические элементы:
Чтобы программа работала правильно, необходимо соблюсти ряд условий, а именно;
Оптический датчик «17» рис 1. , может быть другой конструкции, но обязательно на 18 отверстий.
Винт позиционера, обязательно с шагом 1,25мм - это стандартный шаг для винта диаметром 8мм.
Шаговый двигатель позиционера 48 шагов/оборот, 7.5 градусов/шаг - это самые распространённые двигатели в оргтехнике.
Демонстрационный ролик работы станка:
Ниже в прикреплении (в архиве) собраны все необходимые файлы и материалы для сборки намоточного станка.
Если по сборке и наладке у кого-то возникнут какие либо вопросы, то задавайте их на форуме. По возможности постараюсь ответить и помочь.
Желаю всем удачи в творчестве и всего наилучшего!
Архив "Намоточный станок"."